Información Básica.
No. de Modelo.
SHR-HVLV3020HZIR750R-AT
Clase
Lente de Enfoque Automático
Certificación
CE, FCC, RoHS, ISO9001: 2000
Característica
Impermeable, Miniatura
Distancia Efectiva
Over 1000m
Tamaño del sensor
1/4 pulgadas
Control Remoto
Con Control Remoto
distancia de detección térmica
15400m para humanos, 19600m para vehículos
distancia de reconocimiento térmico
7000m para humanos, 12000m para vehículos
distancia de cámara diurna
5000m
lente térmica
34-690 mm, zoom óptico de 20 aumentos
control de lente térmica
enfoque eléctrico, enfoque automático
resolución de espacio de lente térmica
0,02~0,44 mrad
lente de cámara de luz diurna
60 mm, zoom óptico de 12.5-750 aumentos
grado de protección
ip66
preajustes
128
detector
fpa refrigerado
Paquete de Transporte
Carton / Wooden Case
Especificación
50 kg
Marca Comercial
Sheenrun
Origen
Shandong Province, China
Capacidad de Producción
50 Units / Year
Descripción de Producto
Electro-ópticos de radar del sistema de vigilancia de la elevación
1. Descripción general
Electro-ópticos de radar del sistema de vigilancia de la elevación es una especie de reconocimiento y móvil terrestre del sistema de comando con multi-sensores trabajan juntos. Su principal función es buscar de forma rápida, buscar, identificar, rastrear y localizar el suelo blanco en movimiento. Se utiliza principalmente para la tierra o de largo alcance a baja altitud vigilancia día y noche en el área designada como la defensa de la frontera, el borde de turno, la llave de la zona de vigilancia, la lucha contra el terror, etc.
Características principales:
Como el suelo o de baja altitud la detección de blanco en movimiento y reconocimiento de equipos móviles de radar, sistema de elevación electro-ópticos puede detectar el movimiento de la corona en el suelo o volar en baja altitud en el recinto de las condiciones climáticas, los requisitos de la aplicación de vigilancia de día y noche. Principalmente tiene funciones tales como búsqueda y descubrimiento, seguimiento e identificación, información completa y procesamiento de la pantalla y la información de emergencia de seguridad, etc.
2.1. Búsqueda y descubrimiento
El sistema principalmente utiliza el equipo de electro-ópticos y radar de reconocimiento de la tierra como la detección, consciente de la parte delantera de la búsqueda del objetivo en movimiento y la detección, seguimiento e identificación automática y posicionamiento; lograr la plena autonomía y la búsqueda de todo tiempo y el descubrimiento y la detección de blanco en movimiento en el suelo o en el ultra-baja altitud o de otra área de defensa. El sistema tiene la interfaz de datos estándar, que puede ser conectado a la superior centro de monitorización por medio de microondas digital, 4G y otros equipos de comunicación, y en tiempo real la información de la información de actividad.
2.2. El seguimiento e identificación
Por el radar y equipo de electro-ópticos pueden controlar automáticamente el objetivo en movimiento en el área de detección. Trayectoria de movimiento en tiempo real de blanco en movimiento en el área de defensa puede visualizarse en el seguimiento de la pantalla, y lleva en el reconocimiento de imagen, visualización y almacenamiento y recuperación.
2.3. Información completa de procesamiento de la& mostrar
El sistema puede buscar, el número y marca varios objetivos a través de la fusión de múltiples fuentes de información tales como radares y electro-dispositivo óptico, y en tiempo real genera multi-objetivo amplio mapa de situación basada en el 3D los SIG. En el amplio esquema de situación, podemos mostrar la ventana en forma de hacer clic en el objetivo, mostrar el vídeo/imagen del destino y ubicación, velocidad y otra información; El sistema también puede mostrar información como la luz visible, infrarrojo de vídeo, etc. y enviar información de supervisión al centro de control.
2.4. Seguridad de la información de emergencia
El sistema puede pasar rápidamente a urgencias Ubicación y área de la línea de defensa, todo el tiempo, de reconocimiento de vigilancia a distancia, la búsqueda y rastreo de blanco en movimiento, generando en tiempo real basados en información geográfica completa de la situación, para supervisar el centro de mando, para proporcionar la eliminación de emergencia completo con un potente apoyo de inteligencia.
3. Composición del sistema
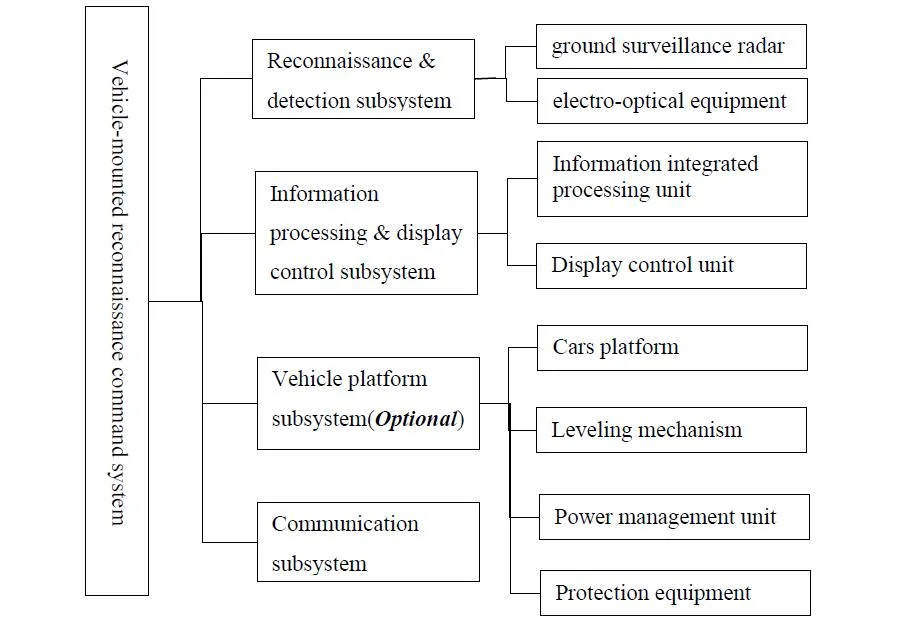
El radar del varillaje de electro-ópticos sistema consta de los siguientes componentes: el subsistema de detección y reconocimiento, el procesamiento de información y el subsistema de control de la pantalla, el vehículo del subsistema de la plataforma (opcional) y el subsistema de comunicación. El subsistema de detección y reconocimiento de la tierra, incluyendo los radares de vigilancia y reconocimiento de la electro-ópticos de los equipos; procesamiento de información y el subsistema de control de la pantalla está compuesta por unidad de procesamiento de información integrada, la unidad de control de la pantalla, el control del vehículo del subsistema de la plataforma Plataforma; incluidos los automóviles, mecanismo de nivelación de la plataforma, fuente de unidad de gestión y el equipo de protección, etc., su composición, diagrama de bloque como se muestra en la siguiente figura.
Electro-ópticos de radar del sistema de vigilancia de la elevación es una especie de reconocimiento y móvil terrestre del sistema de comando con multi-sensores trabajan juntos. Su principal función es buscar de forma rápida, buscar, identificar, rastrear y localizar el suelo blanco en movimiento. Se utiliza principalmente para la tierra o de largo alcance a baja altitud vigilancia día y noche en el área designada como la defensa de la frontera, el borde de turno, la llave de la zona de vigilancia, la lucha contra el terror, etc.
Características principales:
- La coordinación del sistema de radar y sistemas electro-ópticos, de forma complementaria ventajas.
- Multi-función de vigilancia, puede detectar el movimiento de la corona en el suelo.
- La adopción de imágenes térmicas de infrarrojos y luz visible cámaras para darse cuenta de la detección de destino, el seguimiento e identificación de la noche y noche.
Como el suelo o de baja altitud la detección de blanco en movimiento y reconocimiento de equipos móviles de radar, sistema de elevación electro-ópticos puede detectar el movimiento de la corona en el suelo o volar en baja altitud en el recinto de las condiciones climáticas, los requisitos de la aplicación de vigilancia de día y noche. Principalmente tiene funciones tales como búsqueda y descubrimiento, seguimiento e identificación, información completa y procesamiento de la pantalla y la información de emergencia de seguridad, etc.
2.1. Búsqueda y descubrimiento
El sistema principalmente utiliza el equipo de electro-ópticos y radar de reconocimiento de la tierra como la detección, consciente de la parte delantera de la búsqueda del objetivo en movimiento y la detección, seguimiento e identificación automática y posicionamiento; lograr la plena autonomía y la búsqueda de todo tiempo y el descubrimiento y la detección de blanco en movimiento en el suelo o en el ultra-baja altitud o de otra área de defensa. El sistema tiene la interfaz de datos estándar, que puede ser conectado a la superior centro de monitorización por medio de microondas digital, 4G y otros equipos de comunicación, y en tiempo real la información de la información de actividad.
2.2. El seguimiento e identificación
Por el radar y equipo de electro-ópticos pueden controlar automáticamente el objetivo en movimiento en el área de detección. Trayectoria de movimiento en tiempo real de blanco en movimiento en el área de defensa puede visualizarse en el seguimiento de la pantalla, y lleva en el reconocimiento de imagen, visualización y almacenamiento y recuperación.
2.3. Información completa de procesamiento de la& mostrar
El sistema puede buscar, el número y marca varios objetivos a través de la fusión de múltiples fuentes de información tales como radares y electro-dispositivo óptico, y en tiempo real genera multi-objetivo amplio mapa de situación basada en el 3D los SIG. En el amplio esquema de situación, podemos mostrar la ventana en forma de hacer clic en el objetivo, mostrar el vídeo/imagen del destino y ubicación, velocidad y otra información; El sistema también puede mostrar información como la luz visible, infrarrojo de vídeo, etc. y enviar información de supervisión al centro de control.
2.4. Seguridad de la información de emergencia
El sistema puede pasar rápidamente a urgencias Ubicación y área de la línea de defensa, todo el tiempo, de reconocimiento de vigilancia a distancia, la búsqueda y rastreo de blanco en movimiento, generando en tiempo real basados en información geográfica completa de la situación, para supervisar el centro de mando, para proporcionar la eliminación de emergencia completo con un potente apoyo de inteligencia.
3. Composición del sistema
El radar del varillaje de electro-ópticos sistema consta de los siguientes componentes: el subsistema de detección y reconocimiento, el procesamiento de información y el subsistema de control de la pantalla, el vehículo del subsistema de la plataforma (opcional) y el subsistema de comunicación. El subsistema de detección y reconocimiento de la tierra, incluyendo los radares de vigilancia y reconocimiento de la electro-ópticos de los equipos; procesamiento de información y el subsistema de control de la pantalla está compuesta por unidad de procesamiento de información integrada, la unidad de control de la pantalla, el control del vehículo del subsistema de la plataforma Plataforma; incluidos los automóviles, mecanismo de nivelación de la plataforma, fuente de unidad de gestión y el equipo de protección, etc., su composición, diagrama de bloque como se muestra en la siguiente figura.
Figura 1 El radar de vigilancia de la elevación electro-ópticos Composición del sistema.
3.1. El subsistema de detección y reconocimiento
El reconocimiento y el subsistema de detección de radar de vigilancia de tierra incluye, el equipo de reconocimiento de la electro-ópticos, etc., dándose cuenta de la operación de reconocimiento y detección del movimiento de la corona en la tierra y en el ultra-baja altitud la zona.
El subsistema de detección y reconocimiento es principalmente para buscar de forma rápida, buscar, identificar, a principios de advertir, la vía y localizar el suelo blanco en movimiento sobre la tierra y en el área de baja altitud día y noche, e integrar la detección de radar, la detección de electro-ópticos, procesamiento de imagen y la maquinaria de precisión en un cuerpo.
3.1.1 El Radar de Vigilancia Terrestre
El radar de vigilancia terrestre se utilizan principalmente para el reconocimiento y detección de los derechos humanos, los vehículos, y un bajo nivel de destino en recinto de las condiciones climáticas en la frontera. Dispone de pequeño volumen, peso ligero, fácil operación y alta fiabilidad, etc. El radar tiene un mecanismo de accionamiento giratorio y un anillo colector, que mejora notablemente la fiabilidad y continua el tiempo de trabajo del equipo. Su apariencia diagrama se muestra en la figura 2.
El radar es una especie de multiusos portable del sistema de radar de vigilancia, utilizando FMCW sistema, tiene un pequeño volumen, peso ligero, pequeño área ciega y la distancia, la gama alta resolución y buen rendimiento antiinterferencias radar, etc. El diseño tiene una interfaz Ethernet, Wireless de la interfaz de comunicación digital, sistema de posicionamiento y fondo de mapa electrónico, etc., que se pueden intercambiar con otros equipos como el equipo de electro-ópticos.
Características principales:
El reconocimiento y el subsistema de detección de radar de vigilancia de tierra incluye, el equipo de reconocimiento de la electro-ópticos, etc., dándose cuenta de la operación de reconocimiento y detección del movimiento de la corona en la tierra y en el ultra-baja altitud la zona.
El subsistema de detección y reconocimiento es principalmente para buscar de forma rápida, buscar, identificar, a principios de advertir, la vía y localizar el suelo blanco en movimiento sobre la tierra y en el área de baja altitud día y noche, e integrar la detección de radar, la detección de electro-ópticos, procesamiento de imagen y la maquinaria de precisión en un cuerpo.
3.1.1 El Radar de Vigilancia Terrestre
El radar de vigilancia terrestre se utilizan principalmente para el reconocimiento y detección de los derechos humanos, los vehículos, y un bajo nivel de destino en recinto de las condiciones climáticas en la frontera. Dispone de pequeño volumen, peso ligero, fácil operación y alta fiabilidad, etc. El radar tiene un mecanismo de accionamiento giratorio y un anillo colector, que mejora notablemente la fiabilidad y continua el tiempo de trabajo del equipo. Su apariencia diagrama se muestra en la figura 2.
El radar es una especie de multiusos portable del sistema de radar de vigilancia, utilizando FMCW sistema, tiene un pequeño volumen, peso ligero, pequeño área ciega y la distancia, la gama alta resolución y buen rendimiento antiinterferencias radar, etc. El diseño tiene una interfaz Ethernet, Wireless de la interfaz de comunicación digital, sistema de posicionamiento y fondo de mapa electrónico, etc., que se pueden intercambiar con otros equipos como el equipo de electro-ópticos.
Características principales:
- Ligero, compacto el radar
- Las 24 horas del día de trabajo
- Fuerte de la represión de la tierra de onda, baja tasa de falsas alarmas
Figura 2 Radar de Vigilancia de tierra
Descripción: - Frecuencia: I/J banda (9,5 a 10,5 g)
- Distancia de detección :
- Derechos a 5 km; vehículo:10km.
- Precisión: la distancia de 10 m/Ángulo azimut 0,4 °
- Ámbito de búsqueda de la antena: área de búsqueda del ventilador y 360 grados
- Potencia de salida: 10 mW, 100 mW, de 1 W bajo control.
- La velocidad de búsqueda: 6 ° / s, 12 ° / s, 24 ° / s
- Consumo de energía: 24 V CC ≤40 W
- El radar de la unidad de front-end: 600 * 320 * 128 mm
- El radar de la unidad de terminal: 270 x 220 x 60 mm
| No. | El tema | El indicador | Comentario |
| 1 | Sistema de radar | La modulación de frecuencia lineal sistema de radar de onda continua | |
| 2 | Distancia de detección | ≥5 km de derechos ≥10Km vehículo | |
| 3 | Precisión de medición | La precisión de acimut (rms) ≤ 0,5° Precisión de medición de la gama (rms)≤ 10 m. | |
| 4 | Zona de detección | Scan modle:360° | |
| La viga de inclinación ángulo:20° | |||
| 5 | La velocidad de búsqueda | 60°/s. | |
| 6 | Detecta la velocidad deseada | (0.2-30)m/seg. | |
| 7 | El peso | Cuerpo:≤25kg. | |
| 8 | Las horas de trabajo continuo | 7×24 h. | Estado de trabajo de CA |
| 9 | La capacidad de procesamiento de destino múltiple | TWS vía:22 Lote | |
| 10 | Función Antijamming | Tiene la capacidad de inhibir la interferencia con la misma frecuencia. Tiene la capacidad de lucha contra el suelo el desorden, desorden de la onda y el tiempo el desorden. | |
| 11 | La instalación | Artículos de papelería y montados en vehículos | |
| 12 | La fiabilidad y mantenimiento | MTBF:≥5000 h. MTTR:≤0,5 h. | |
| 13 | Interface | Ethernet | |
| 14 | El tamaño | El radar de front-end:Ø676mm x 550mm. | |
| 15 | La adaptación ambiental | La temperatura de trabajo:-20ºC~+55ºC. La temperatura de almacenamiento:-25ºC~+65ºC. La humedad:+35ºCcondition,≥ (95±3%). Prueba de lluvia:moderado-a-Heavy Rain. A prueba de polvo, anti-niebla salina. |
La electro-Cámara de reconocimiento óptico consta de la luz visible, de la cámara de infrarrojos cámara térmica de frío, la precisión de recargar pantilt plataforma y procesador de vídeo inteligente, como se muestra en la FIG. 3. La electro-principalmente de la Cámara de reconocimiento óptico se completa el día y noche, la identificación y seguimiento de la detección de la meta en el complejo de fondo.
Figura 3 Electro-ópticos de la Cámara de reconocimiento
Características principales:
- Adoptar la tecnología de imagen térmica zoom continuo de imágenes, está claro, no sólo realizar una amplia gama de búsqueda, pero también puede identificar el destino en la distancia
- Diseño de doble sensor, puede buscar, la pista, identificar y localizar el objetivo del día y noche.
- 640×512 sensor de enfriamiento de alta resolución,15µm de píxel, detectar con mayor claridad y mayor distancia
- La reducción de ruido de imagen avanzadas de procesamiento, aumentar el detalle de imagen digital mejora, negro/blanco/salida de imagen color pseudo caliente
- Procesamiento de imágenes de vídeo inteligente integrado sistema para cumplir con el complejo entorno geográfico de búsqueda, captura, el seguimiento y reconocimiento.
- Bajo consumo de energía, arrancar rápidamente, un rendimiento estable, una imagen clara, imágenes uniformes
- El funcionamiento es simple, fácil de usar y mantenimiento
- Aleación de aluminio de fundición de precisión de shell, sellado resistente al agua, llena con gas nitrógeno, resistencia al mal ambiente, la vida laboral ultralong
| Distancia de detección | La luz visible | 5000m | ||
| Thermal imaging | Target | Derechos(1,8×0,5 m) | 2,3 millones de vehículos×2,3M) | |
| La detección | 15400m | 19500m | ||
| El reconocimiento | 7000m | 12000m | ||
| La identificación | 4000m | 8400m | ||
| Lente HD | La distancia focal | 12.5~750mm | ||
| El FOV | 0.6°~35° | |||
| El enfoque automático | El apoyo | |||
| Cámara HD | El tipo de sensor | 1/1.8'' Progressive Scan CMOS | ||
| Formato de codificación | H.264/H.265/MJPEG | |||
| La resolución de vídeo | 1080P,CIF,apoyar tres arroyo | |||
| La tasa de bits de vídeo | 32 Kbps~16Mbps | |||
| Velocidad de fotogramas de vídeo | 1~25F/S (50Hz), 1~30F/S (60Hz). | |||
| Lente térmica | La distancia focal | 50~750mm | ||
| El FOV | 0.8°×0,7°~16.1°×12,9° | |||
| El espacio de resolución | 0.02~0.44mrad | |||
| Control de la lente | E-zoom, enfoque e | |||
| El detector | Tipo | Enfría FPA | ||
| La resolución | 640×512 | |||
| La gama del espectro | 3.7~4.8μm | |||
| NETD | ≤25MC | |||
| La velocidad de fotogramas | 25Hz | |||
| NUC | Manual de auto// la corrección de fondo | |||
| Proceso de imágenes | El DDE | |||
| La salida de vídeo | PAL | |||
| La hora de inicio | ≤7.5minute (25ºC) | |||
| Pantilt | Cargar | 50kg(Top carga). | ||
| Angle | Pan: 360° interminables sigue rotando, Inclinación: -45°~+45° | |||
| La velocidad | Pan: 0,01°~12°/s, Inclinación: 0,01°~8°/s | |||
| Los ajustes preestablecidos | 255 | |||
| Crucero automático | 2,todo el mundo puede tener 64 ajustes predeterminados | |||
| Auto scan | 1 | |||
| Interface | La alimentación | DC30V | ||
| Network | 1×10Base-T/100Base-TX,interfaz RJ45 | |||
| Los indicadores ambientales | La temperatura de trabajo | -25ºC~+55ºC | ||
| La temperatura de almacenamiento | -40ºC~+65ºC | |||
| Grado de protección | IP66. | |||
| La alimentación | Toda la potencia | De entrada de ancho de AC90 ~ 305V DC30V/8A fuente de alimentación waterproof | ||
| El consumo de energía | ≤150W. | |||
| Características físicas | La instalación | Instalación de la base de exterior | ||
La principal tarea del procesamiento de información y el subsistema de control de la pantalla es recibir la información de la imagen de vídeo de la electro-instrumento de reconocimiento óptico, el objetivo de coordinar la información de la detección de radar, la alarma de la información transmitida por otros sensores, etc. información y procesamiento de imágenes preliminares el procesamiento de la fusión de la información completa de la situación regional local; al mismo tiempo, puede recibir instrucciones de control emitidos por el centro de control de supervisión, y aplicar directamente el control del sistema. El procesamiento de información y el sistema de control de la pantalla incluye la unidad de control de la pantalla y la unidad de procesamiento de información integrados.
La pantalla de la unidad de control
La unidad de control de la pantalla includingradar terminal, terminales de óptica, la comunicación controlador, conmutadores de red, servidor de streaming multimedia y otros equipos, es el procesamiento de datos, operación y el sistema de control y visualización, completar la operación y control de la detección de reconocimiento subsistema.
1) pantalla de radar terminal de control.
Se utiliza principalmente para controlar el apagado/encendido de radar, la rotación de la antena, varios ajustes de parámetros de procesamiento de señal de radar, y procesamiento de datos, y la vigilancia de la estado de trabajo de radar.
Función principal:
A) la configuración del área de Monitor
El análisis puede ser configurado para adaptarse a diferentes requisitos de la misión como la supervisión de las áreas clave y buscar y encontrar.
B) objetivo el seguimiento y trayectoria de montaje automático
La vía de la meta mientras escanea, multi-objetivo puede ser procesada de forma simultánea; el objetivo de entrar en la zona delimitada puede ser ajusta automáticamente la pista y alarma.
C) la pantalla de destino functionDisplay trace, pista de destino y los parámetros de destino (el número de lote, la distancia, ubicación, velocidad); mostrar objetos de fondo de destino y el desorden; mostrando el desorden de tierra; Mostrar área de la alarma, alarma línea; un sistema de visualización de parámetros de trabajo, el estado de trabajo, etc..
D) la función de ajuste
Establecer el estado de funcionamiento y visualizar el estado de la syetem.
E) La función de grabación
Para registrar el tiempo de trabajo y el tiempo de trabajo acumulado de radar; el desorden y el registro de datos objetivo; la reproducción y visualización de datos de registro histórico, etc..
2) pantalla electro-ópticos y terminal de control.
Principalmente responsable por el control de equipos de reconocimiento de la electro-ópticos, incluyendo encendido/apagado de la máquina, el azimut de servocontrol de lanzamiento, la cámara y el control de imagen térmica de infrarrojos.
Características principales
Una función de control):
Control de la electro-ópticos, incluida la conmutación de conexión/desconexión de los equipos de electro-ópticos, azimut de servocontrol de lanzamiento, el control de zoom, el modo multi-función de control de la cámara de visión nocturna por infrarrojos, un conjunto de sistema de control puede controlar varios front-end de reconocimiento óptico de electro-equipo.
B) Objetivo de la captura automática y función de alarma:
Objetivo en movimiento en la zona de vigilancia se puede encontrar automáticamente por el procesador de vídeo inteligente y puede ser automática rastreado, reconocido. Puede darse cuenta de electro-ópticos automático de control, sin personal deber de un largo tiempo.
4. Características del sistema
El radar del varillaje de electro-ópticos Sistema de Vigilancia es un nuevo tipo de sistema de reconocimiento móvil terrestre que adopta una variedad de tecnología avanzada, específicamente para el suelo y un bajo nivel de detección de la zona. Puede ser el clima, la omni-direccional para detectar el objetivo en movimiento en el suelo o en una zona de bajo nivel de acabado, el objetivo de la meta de reconocimiento, vigilancia, seguimiento y tratamiento.
Características principales:
A) El equipo de detección es flexible
La adopción de tecnología de diseño modular, de acuerdo a la demanda real que puede elegir una variedad de equipo de detección de manera flexible. El radar tiene las características de detección rápida de la meta en el día/noche y bajo la condición de todo tipo de clima. Y equipos de detección de electro-ópticos puede proporcionar imágenes de destino, no se ve afectado por interferencias electromagnéticas, también tiene las características de la jornada de trabajo y la noche. La combinación de estos dos tipos de equipos, el sistema puede buscar, localizar, identificar, rastrear y localizar el suelo blanco en movimiento rápidamente bajo la condición de todas las condiciones climáticas, todos los días, el complicado entorno electromagnético y complejas condiciones geográficas.
B) del sensor de múltiples y datos de la fusión, búsqueda exhaustiva y precisa ubicación
Una gran variedad de medios técnicos (radar, dispositivo electro-ópticos) la realización de una gama completa de reconocimiento, la avanzada tecnología de fusión de datos puede alcanzar el objetivo de la búsqueda rápida búsqueda, identificación y ubicación, visualización en tiempo real de blanco en movimiento la trayectoria y la información de la imagen, ofrece una rica información de destino para el inspector.
C) operación sencilla e intuitiva pantalla
Basado en el mapa de situación general de los GIS y GPS, la información acerca de la distribución de cada unidad de reconocimiento, la ubicación del objetivo en movimiento, el movimiento trayectoria y la imagen puede ser directamente en pantalla, que pueden mejorar considerablemente la eficiencia de reconocimiento de campo. También puede ajustar manualmente la alarma de múltiples áreas y líneas de alarma de cualquier forma en el mapa electrónico, que puede automáticamente una alarma cuando el objetivo en movimiento a través de la línea de alarma o aparece en la zona de alarma.
D) diseño de la red Modular con fuertes expansibility
Cada uno de los principales equipos es modular diseñado, y puede ser combinación flexible. El sistema está en red y puede ser fácilmente en red para formar una red regional de comando de reconocimiento, que puede integrarse fácilmente en la frontera existente sistema de vigilancia. Controlador de la comunicación con varias interfaces es adoptado para hacer el sistema más compatible y expansible.
E) El diseño de avanzada, alta fiabilidad
El radar adopta tecnología de escaneo omnidireccional electric, ningún mecanismo de barrido mecánico. El equipo de electro-ópticos adopta la tecnología de procesamiento inteligente de vídeo. Todos los equipos son totalmente sellado y diseñado para hacer el sistema apropiado para que funcione bien en el medio ambiente hostil.
5. Procedimiento de trabajo del sistema
Sistema 5.1.
La sonda dispositivo se activa y la calibración del sistema se ha completado.
5.2 La búsqueda de Radar y guiar a la rotación de electro-ópticos
El terreno capturado radar de reconocimiento de los alrededores o en el área de diseño, y cuando el objetivo en movimiento, la información de alarma fue enviado y el equipo de electro-ópticos fue guiado a la meta.
5.3 La captura de electro-ópticos y destino de seguimiento
Cuando el dispositivo electro-ópticos es transferido a la búsqueda se lleva a cabo automáticamente de modo que el destino puede ser bloqueado en el campo y el destino puede ser capturado. Después de que el objetivo es capturado, el sistema entra en el estado de seguimiento automático y rastrea automáticamente y se identifica el destino.
5.3.1 El seguimiento manual
El seguimiento manual, equipado con un joystick o los botones del ratón se puede utilizar para el seguimiento manual. Cuando el objetivo de capturar y algoritmo de seguimiento manual, gire el pan/inclinación para seleccionar objetos de destino. Cuando el destino es elegido, los objetos se han capturado el bastidor. A continuación, utilice los botones del joystick de seguimiento en el modo de seguimiento. Si utiliza el ratón, la tecla izquierda haga clic en el modo de seguimiento. Después de entrar en el modo de seguimiento, pan/tilt rastrea automáticamente el destino de acuerdo con el objetivo de trayectoria. totalmente el seguimiento automático de control de modo de operación de giro e inclinación. Haga clic en el seguimiento de la palanca de mando o el botón izquierdo del ratón para desbloquear el destino actual.
5.3.2 El seguimiento automático (opcional).
Si el dispositivo tiene el modo de seguimiento automático, cuando el radar da a nivel del ángulo de inclinación, pan/tilt gira a la posición fijada, y luego entrar en el modo de captura automática. Modo de captura automática, después de objetivo se mueve en el área de diseño, el modo de seguimiento Inicio, luego la función de seguimiento automático para capturar el destino y la vía, así como realizar el seguimiento de la rompieron en blanco en movimiento. | | |
5.4 La fusión de la pantalla y la situación de posicionamiento
Cuando el dispositivo electro-ópticos está realizando un seguimiento de forma automática, el destino de los datos del ángulo de salida. El objetivo es el posicionamiento alcanzado con el objetivo de la fusión de datos y el radar de ángulo la distancia de los datos. Y la posición de destino y la trayectoria de movimiento se muestran en el amplio mapa de situación.